Docker環境でPythonアプリケーションを展開する際、イメージビルドが長時間かかる、またはgccなどのコンパイラ依存問題でビルドが失敗することがよくあります。この場合、最も効果的な解決策の一つがPython Wheelを活用することです。
この記事では、Python Wheelの概念と利点、そしてDockerfileでこれを活用してビルドプロセスを最適化する方法について説明します。
1. Python Wheelとは何か?

Wheel(.whl)はPythonのバイナリ配布フォーマット(Built Distribution)です。
一般的にPythonパッケージは二つの形態で配布されます。
-
Source Distribution (
sdist,.tar.gz): ソースコード形式です。インストール時にユーザーのコンピュータでコンパイル(Build)プロセスが必要です。 -
Built Distribution (
bdist_wheel,.whl): 事前にコンパイルされたバイナリ形式です。インストール時に別途コンパイルせず、ファイルをコピーするだけでインストールが完了します。
簡単に比喩を使うと、ソース配布版は「組み立てが必要な家具」であり、Wheelは「完成された家具」です。Wheelを使うことで、組み立てる時間やツール(コンパイラ)が必要ありません。
2. 一般的なpip installとの違い
私たちがよく使用するpip install <package>コマンドを実行すると、内部的には次の優先順位で動作します。
-
Wheelファイルが存在する場合: 該当バイナリをダウンロードして即座にインストールします。(非常に速い)
-
Wheelファイルがない場合: ソースファイル(
tar.gz)をダウンロード後、ローカル環境でコンパイル(Build)を実行してインストールします。(遅い、コンパイルツールが必要)
違いの概要表
| 区分 | Source Distribution (sdist) | Wheel (whl) |
|---|---|---|
| 拡張子 | .tar.gz, .zip |
.whl |
| インストールプロセス | ダウンロード -> コンパイル -> インストール | ダウンロード -> インストール |
| インストール速度 | 遅い(コンパイル時間がかかる) | 非常に速い |
| 必要なツール | コンパイラ (gcc, g++, ヘッダーファイルなど) |
なし(pipさえあればよい) |
| OS依存性 | コンパイル時の環境に依存 | ビルドされたOS/アーキテクチャに依存 |
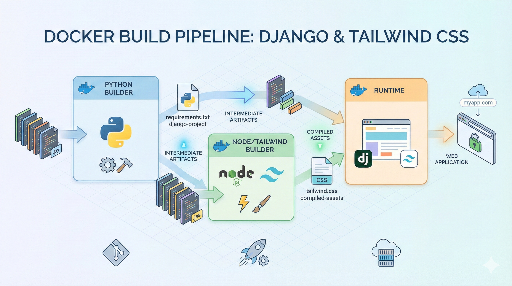
3. DockerfileでWheelを使う理由(利点)
Docker環境、特にMulti-stage Build(マルチステージビルド)でWheelを使用すると、次のような明確な利点があります。
-
ビルド速度の飛躍的向上:
pandas,numpyのようにC/C++で書かれた重いライブラリを毎回コンパイルする必要がありません。 -
イメージサイズの軽量化: 最終実行イメージ(Runtime Image)には
gcc,build-essentialのような重いコンパイルツールを含める必要がありません。 -
安定性の確保: ネットワークの問題や外部ストレージの一時的障害でビルドが壊れるのを防ぎ、ローカルで事前にビルドされたファイルを使用することもできます。
4. Dockerfileの作成および使用法
Wheelを活用したDockerビルドは主にBuilderステージでWheelファイルを生成し、Finalステージでこれを取得してインストールする方式で行われます。
例: Multi-stage Buildを活用したDockerfile
以下はCライブラリ依存のパッケージを効率的にインストールするパターンです。
# [Stage 1] Builder: Wheelファイル生成
FROM python:3.9-slim as builder
# コンパイルのための必須パッケージインストール(最終イメージには含まれない)
RUN apt-get update && apt-get install -y \
build-essential \
gcc \
&& rm -rf /var/lib/apt/lists/*
WORKDIR /app
# requirements.txtコピー
COPY requirements.txt .
# pip wheelコマンドで.whlファイルを/app/wheelsディレクトリに生成
# -w: wheelファイルを保存するパス指定
RUN pip wheel --no-cache-dir --no-deps --wheel-dir /app/wheels -r requirements.txt
# [Stage 2] Final: 実行イメージ
FROM python:3.9-slim
WORKDIR /app
# Builderステージで生成されたWheelファイルのみコピー
COPY --from=builder /app/wheels /wheels
COPY --from=builder /app/requirements.txt .
# Wheelファイルを利用してパッケージインストール
# --no-index: PyPIインデックスを無視してローカルファイルのみ検索
# --find-links: インストールパッケージを探すパス指定
RUN pip install --no-cache --no-index --find-links=/wheels -r requirements.txt \
&& rm -rf /wheels
# アプリケーションコードコピー
COPY . .
CMD ["python", "main.py"]
主要コマンド説明
-
pip wheel: パッケージをインストールせず、対応する環境に合った.whlファイルを生成し、指定されたディレクトリに保存します。 -
--wheel-dir: 生成されたWheelファイルが保存される位置です。 -
--find-links=/wheels: PyPIサーバー(インターネット)からパッケージをダウンロードするのではなく、指定されたローカルパスからパッケージを探すよう指示します。
おわりに
Dockerビルド時にPython Wheelを活用することは選択肢ではなく必須の最適化手法に近いです。特にCI/CDパイプラインで繰り返しビルドが行われる環境であれば、ビルド時間を短縮し、イメージサイズを減らすことで大幅なコスト削減効果を得ることができます。
現在作成中のDockerfileにgccインストールプロセスが含まれている場合、Wheelを利用したマルチステージビルドに切り替えてみてください。



![thumbnail of [Python標準ライブラリ - 4] randomモジュール活用:選択、サンプリング、シャッフル、再現性](/media/editor_temp/6/d231fe37-ba66-4222-bca7-4d3dd8e33399.png)
コメントはありません。