NumPy-Grundoperationen für Deep Learning: +, -, *, /, **, Vergleiche, sum/mean/max/min, axis
1. Warum sollten wir zuerst die Grundoperationen festlegen?

In Deep Learning reduziert sich unsere Arbeit im Wesentlichen auf:
- Eingaben/gewichte addieren (
+) - Multiplizieren (
*, Matrixmultiplikation) - Nichtlineare Funktionen anwenden (
**,relu,sigmoidusw.) - Den Verlust berechnen und anschließend
- den Durchschnitt (
mean) oder - die Summe (
sum) bilden
PyTorch‑Tensoroperationen folgen exakt dem Stil von NumPy. Wenn man die Intuition in NumPy beherrscht, werden die Deep‑Learning‑Formeln viel klarer.
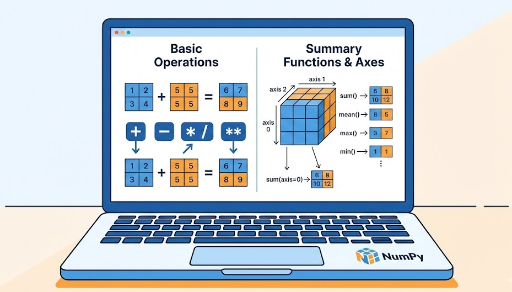
2. Elementweise arithmetische Operationen: +, -, *, /, **
NumPy‑Array‑Operationen sind elementweise.
import numpy as np
x = np.array([1, 2, 3])
y = np.array([10, 20, 30])
print(x + y) # [11 22 33]
print(x - y) # [ -9 -18 -27]
print(x * y) # [10 40 90]
print(y / x) # [10. 10. 10.]
print(x ** 2) # [1 4 9]
- Arrays gleicher Länge in 1‑D: elementweise
- 2‑D, 3‑D: gleicher Index‑Ort
2.1 Operationen mit Skalar
Skalar‑Operationen funktionieren ebenfalls nahtlos.
x = np.array([1, 2, 3])
print(x + 10) # [11 12 13]
print(x * 2) # [2 4 6]
print(x / 2) # [0.5 1. 1.5]
Solche „gleichmäßige Addition/Multiplikation“ werden in Deep Learning häufig für Normalisierung, Skalierung oder Bias‑Hinzufügung verwendet.
PyTorch‑Tensoren verhalten sich identisch:
x_t + y_t,x_t * 2,x_t ** 2usw.
3. Vergleichsoperationen: >, <, >=, <=, ==, !=
Vergleiche zwischen NumPy‑Arrays liefern boolesche Arrays.
import numpy as np
x = np.array([1, 2, 3, 4, 5])
print(x > 3) # [False False False True True]
print(x == 2) # [False True False False False]
Diese booleschen Arrays dienen als:
- Masken zum Filtern bestimmter Elemente
- Zählen von Elementen, die eine Bedingung erfüllen
Beispiel:
x = np.array([1, -2, 3, 0, -5, 6])
mask = x > 0
print(mask) # [ True False True False False True]
# Positive Werte extrahieren
pos = x[mask]
print(pos) # [1 3 6]
# Anzahl positiver Werte
num_pos = np.sum(mask) # True als 1, False als 0
print(num_pos) # 3
In Deep Learning nutzt man solche Muster für:
- Accuracy (Anteil korrekter Vorhersagen)
- Verlustberechnung nur an bestimmten Positionen
PyTorch folgt exakt demselben Muster.
4. Aggregationsfunktionen: np.sum, np.mean, np.max, np.min
4.1 Ohne axis: Gesamter Array
Standardmäßig wird die Summe, der Mittelwert, das Maximum und das Minimum über den gesamten Array berechnet.
import numpy as np
x = np.array([1, 2, 3, 4])
print(np.sum(x)) # 10
print(np.mean(x)) # 2.5
print(np.max(x)) # 4
print(np.min(x)) # 1
Für 2‑D‑Arrays gilt dasselbe.
X = np.array([[1, 2, 3],
[4, 5, 6]])
print(np.sum(X)) # 21
print(np.mean(X)) # 3.5
In Deep Learning:
- Durchschnittlicher Verlust über die gesamte Batch
- Mittelwert/Standardabweichung zur Normalisierung
5. Das Konzept von axis
axis bestimmt, entlang welcher Achse die Operation ausgeführt wird.
- Kein
axis→ Berechnung über alle Elemente axisangegeben → Reduktion entlang dieser Achse, andere Achsen bleiben
5.1 Beispiel mit 2‑D
import numpy as np
X = np.array([[1, 2, 3],
[4, 5, 6]]) # shape: (2, 3)
axis=0: Spaltenweise (nach Zeilen herunter)
print(np.sum(X, axis=0)) # [5 7 9]
print(np.mean(X, axis=0)) # [2.5 3.5 4.5]
- Ergebnisshape:
(3,) - Häufig in Deep Learning für Feature‑weise Mittelwerte/Standardabweichungen
axis=1: Zeilenweise (über Spalten)
print(np.sum(X, axis=1)) # [ 6 15]
print(np.mean(X, axis=1)) # [2. 5.]
- Ergebnisshape:
(2,) - Entspricht Sample‑weise Summen/Mittelwerte
5.2 Häufige axis‑Beispiele in Deep Learning
Angenommen, wir haben Batch‑Daten:
# (batch_size, feature_dim)
X = np.random.randn(32, 10) # 32 Samples, 10 Features
- Feature‑weise Mittelwerte
mean_per_feature = np.mean(X, axis=0) # shape: (10,)
- Sample‑weise Mittelwerte
mean_per_sample = np.mean(X, axis=1) # shape: (32,)
5.3 axis bei Bild‑Batch
Betrachten wir ein Bild‑Batch im PyTorch‑Stil (N, C, H, W).
# N=32, C=3 (RGB), H=W=64
images = np.random.randn(32, 3, 64, 64)
- Globaler Pixel‑Maximum
global_max = np.max(images) # Skalar
- Channel‑weise Mittelwerte
# axis=(0, 2, 3): Batch, Höhe, Breite reduzieren, Kanal bleibt
channel_mean = np.mean(images, axis=(0, 2, 3)) # shape: (3,)
Dies ist ein gängiges Muster für Kanal‑weise Normalisierung.
6. Aggregationsfunktionen + Vergleichsoperationen: Häufige Muster
6.1 Accuracy‑Berechnung
Beispiel für binäre Klassifikation:
import numpy as np
# Vorhersagen (0–1 Wahrscheinlichkeiten)
pred = np.array([0.2, 0.8, 0.9, 0.3])
# Ground‑Truth (0 oder 1)
target = np.array([0, 1, 1, 0])
# Klassische Schwelle 0.5
pred_label = (pred > 0.5).astype(np.int32) # [0 1 1 0]
# Richtig? → boolesches Array
correct = (pred_label == target) # [ True True True True]
accuracy = np.mean(correct) # True=1, False=0
print(accuracy) # 1.0
PyTorch verwendet nahezu denselben Code.
6.2 Verlust mit Masken
loss = np.array([0.1, 0.5, 0.2, 0.9])
mask = np.array([True, False, True, False])
masked_loss = loss[mask] # [0.1, 0.2]
mean_loss = np.mean(masked_loss)
print(mean_loss) # 0.15000000000000002
Masken + Aggregation sind ein häufiges Muster, um nur bestimmte Positionen im Verlust zu berücksichtigen.
7. Fazit: Die heute behandelten Grundoperationen
Zusammengefasst:
- Arithmetische Operationen (
+,-,*,/,**) * Elementweise, auch mit Skalar - Vergleichsoperationen (
>,<,>=,<=,==,!=) * Boolesche Arrays → Masken, Filtern, Zählen, Accuracy - Aggregationsfunktionen (
np.sum,np.mean,np.max,np.min) * Ohneaxis: Gesamter Array * Mitaxis: Reduktion entlang gewählter Achse axis‑Konzept * 2‑D:axis=0(Spalten),axis=1(Zeilen) * Deep Learning:(batch, feature),(N, C, H, W)– Feature‑, Sample‑, Channel‑weise Statistiken
Sobald man diese Grundoperationen beherrscht, lässt sich fast jede mathematische Formel direkt in NumPy/PyTorch‑Code übersetzen. Komplexe Tensor‑Operationen werden dadurch viel vertrauter.

Es sind keine Kommentare vorhanden.