Waarom is "differentieëren" nodig in deep learning? (Linear algebra, toch?)

1. Introductie: de redelijke twijfel van een ontwikkelaar
Als je deep learning bestudeert, kom je twee wiskundige reuzen tegen: Linear Algebra en Calculus. Voor een ontwikkelaar is er een moment waarop je even de hoofden krult.
"Maar de naam is toch ‘Linear’ algebra. Het gaat om y = ax + b, toch? Een lineaire functie differentiëren levert gewoon een constante (a) op. Is er echt iets te differentiëren? Je kunt gewoon de vergelijking oplossen, en dan is het antwoord klaar?"
Dat klopt. Als een deep learning‑model echt perfect lineair zou zijn, zou je met een matrix‑inverse‑operatie de oplossing (x) direct kunnen vinden.
Maar de problemen die we in de praktijk behandelen zijn niet zo simpel. Vandaag leggen we uit waarom we juist deze ingewikkelde tool, differentieëren, nodig hebben en wat de echte reden is, in de taal van een ontwikkelaar.
2. Differentieëren = "Hoe verandert het resultaat als ik deze instelling aanpas?" (gevoeligheidscontrole)
Laten we differentieëren bekijken als een systeembeheer‑perspectief in plaats van een wiskundige formule.
Stel je voor dat je een enorme zwarte doos‑server hebt met duizenden draaiknoppen (knobs) die je moet afstemmen.
- Doel: de server‑respons (Loss) zo dicht mogelijk bij 0 brengen.
- Probleem: je weet niet welke knoppen je moet draaien om de snelheid te verbeteren. De knoppen zijn onderling afhankelijk.
In dit geval is "differentieëren" een heel eenvoudige handeling.
"Als ik knop 1 iets naar rechts draai (0,001 mm), is de respons sneller? Langzamer?"
Het antwoord op die vraag is precies de differentie (helling).
- Is de differentie positief (+)? 👉 "Het draait, het wordt langzamer? Draai in de andere richting!"
- Is de differentie negatief (-)? 👉 "O, het wordt sneller? Draai nog een beetje in die richting!"
- Is de differentie 0? 👉 "Draai het niet, er is geen verandering? Dat is waarschijnlijk de optimale plek of een knoop die er niet toe doet."
Uiteindelijk is differentieëren in deep learning geen wiskundig probleem oplossen, maar een navigatie‑instrument dat aangeeft in welke richting je de parameters moet aanpassen om de fout te verminderen.
3. Waarom kan het niet in één keer met een vergelijking worden opgelost? (de magie van niet‑lineariteit)
Laten we teruggaan naar die vraag: "Als het lineair is, kan het toch gewoon opgelost worden?"
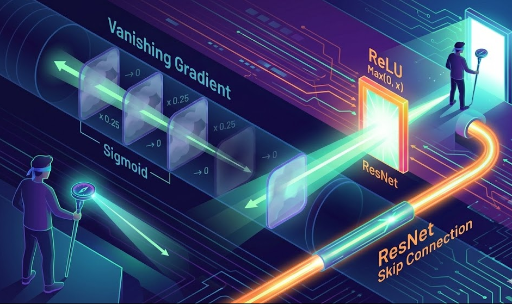
Deep learning is krachtig omdat lineaire operaties (matrix‑vermenigvuldiging) worden gesandwitched met niet‑lineaire functies zoals ReLU of Sigmoid.
- Alleen lineair: Hoe dieper je lagen stapelt, hoe meer je uiteindelijk alleen een grote matrix vermenigvuldigt. (y = a(b(cx)) wordt uiteindelijk y = abcx, toch?)
- Met niet‑lineariteit: De grafiek is niet langer een rechte lijn, maar een kronkelende bergketen. Het is een complex terrein waar je niet met één vergelijking de optimale oplossing kunt vinden.
Daarom geven we de wiskundige oplossing opzij en kiezen we voor differentieëren als een toverstok om de berg beetje bij beetje af te dalen (gradient descent). Dat is de essentie van deep learning‑training.
4. Vector‑differentie? Gewoon "de instellingen van duizenden knoppen tegelijk controleren"
Ziet het uit alsof "vector differentiëren" moeilijk is? Vanuit een ontwikkelaarsperspectief is het Batch Processing.
Als er maar één parameter is, is het een gewone scalair differentie. Maar moderne modellen hebben biljarden parameters (LLM, etc.). Het is onmogelijk om elke knop één voor één te draaien.
Vector/Matrix‑differentie (Gradient) verwerkt al die biljarden vragen in één bewerking.
"Hey, neem nu al je 7,0 miljard parameters! Laat elk van hen een beetje bewegen en rapporteer wat er gebeurt."
Die verzameling rapporten is precies de gradient vector. PyTorch gebruikt GPU’s om die enorme rapporten in een oogwenk te berekenen.

5. Afsluiting: de volgende stap is "Backpropagation"
Nu weten we dat differentieëren een navigatie‑instrument is dat de richting aangeeft om de fout te verminderen. Maar een deep learning‑model heeft tientallen, honderden lagen.
- Om de fout in de outputlaag te verminderen, moet je de directe voorgaande laag aanpassen.
- Om die laag aan te passen, moet je de laag eronder aanpassen, en zo verder…
Deze kettingreactie van differentieëren, berekend met een efficiënte algoritme, is precies de beroemde Backpropagation.
In het volgende artikel gaan we dieper in op hoe backpropagation met één kettingregel (Chain Rule) door deze diepe neurale netwerken navigeert, en de elegante mechanismen die het mogelijk maken.

There are no comments.